专栏名称: 脑机接口社区
| 国内领先的脑机接口自媒体和服务平台,旨在促进脑机接口研究和应用之间的合作及成果转化,为脑机接口领域的工作者提供一个专业的资讯发布、学术交流、成果展示及脑机科普平台。 |
购买VIP
提交新专栏
今天看啥
公众号rss, 微信rss, 微信公众号rss订阅, 稳定的RSS源
TodayRss-海外RSS稳定源

目录
相关文章推荐


|
苹果黑科技 · 本地流畅使用!CC Switch 路由实现 ... · 昨天 |

|
爱范儿 · 曝苹果眼镜明年底发布/英伟达首款自研芯片PC ... · 昨天 |

|
IT之家 · 【微软 GitHub Copilot ... · 2 天前 |
|
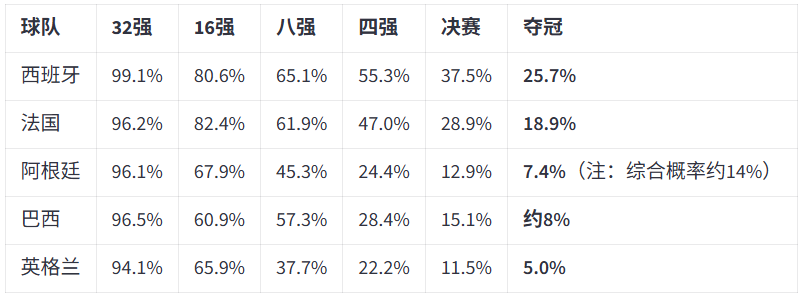
新浪科技 · 【预测西班牙夺冠!高盛建模:#世界杯#“类似 ... · 2 天前 |

推荐文章

|
安徽商报 · 近百只猫被猫贩子溺死在水塘?当地回应:正在调查 1 年前 |

|
科普中国 · 首次发现!中国科学家成功破译→ 1 年前 |

|
河南日报 · 名单公示!全红婵、盛李豪、黄雨婷、李雯雯拟保送 1 年前 |